21-30 of 30 results
-
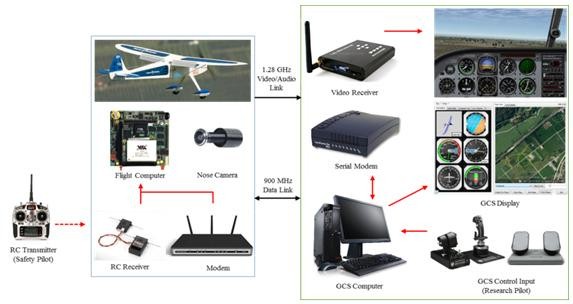
Pilot-in-the-Loop UAS Mobile Research Test-Bed
PI Hever Moncayo
CO-I May Chan
CO-I Ashwini Agrawal
CO-I Agustin Giovagnoli
This project aims to develop and implement a Mobile UAV Ground Control Station (GCS) supporting aviation safety research with pilot-in-the-loop capabilities using unmanned aerial systems platforms, in which flight conditions, such as systems failures, could be simulated in real-time to characterize pilot response, control laws performance, and human-machine and control laws interactions.
 A fruitful achievement of this project will provide a platform to validate and assess new concepts and technologies that are beneficial for improving engineering fidelity of early systems integration testing based on pilots feedback and their interaction with on-board flight controls systems.
A fruitful achievement of this project will provide a platform to validate and assess new concepts and technologies that are beneficial for improving engineering fidelity of early systems integration testing based on pilots feedback and their interaction with on-board flight controls systems.Categories: Faculty-Staff
-
Shielded UAS Operations Detect and Avoid
PI Hever Moncayo
This effort is intended to identify risks and recommend solutions to the FAA that enable shielded UAS operations
This project is funded under the FAA ASSURE program. Certain small UAS (sUAS) Beyond Visual Line of Sight (BVLOS) operations, such as structural inspection, may be in close proximity to structures that are collision hazards for manned aircraft. These types of operations that are in close proximity to manned aviation flight obstacles such that they provide significant protection from conflicts and collisions with manned aircraft are termed “shielded” operations. This effort is intended to identify risks and recommend solutions to the FAA that enable shielded UAS operations. Several topics related to this project include simulation of dynamic systems, simulation environment programming, guidance, control and dynamics, and hardware implementation.Categories: Faculty-Staff
-
Vision and Wireless-Based Surveying for Intelligent OSAM Navigation (VISION)
PI Hever Moncayo
CO-I Kadriye Merve Dogan
In this project, which is a SpaceWERX Phase I STTR program with Orbital Prime, we are developing algorithms to increase autonomy of OSAM applications.
In this project, which is a SpaceWERX Phase I STTR program with Orbital Prime, we are developing algorithms to increase autonomy of OSAM applications. This includes the application of machine learning techniques to improve accuracy of position and orientation estimation for proximity operations in space. Machine learning include deep learning combined with vision-based navigation designed and tested in both, virtual simulation environment and actual thrust-based spacecraft system.
Categories: Faculty-Staff
-
Mitigating GPS and ADS-B Risks for UAS
PI Hever Moncayo
In this project, the research team is investigating different strategies to mitigate such risks and proposing methodologies to increase safety of UAS operations within the National Airspace.
This project is funded under the FAA ASSURE program. Unvalidated or unavailable GPS and “ADS-B In” data poses security and safety risks to automated UAS navigation and to Detect and Avoid operations. Erroneous, spoofed, jammed or dropouts of GPS data may result in unmanned aircraft position and navigation being incorrect. This may result in a fly away beyond radio control, flight into infrastructure or flight into controlled airspace. Erroneous, spoofed, jammed or dropouts of “ADSB-In” data may result in automated unmanned aircraft being unable to detect and avoid other aircraft or result in detecting and avoiding illusionary aircraft.
In this project, the research team is investigating different strategies to mitigate such risks and proposing methodologies to increase safety of UAS operations within the National Airspace. Several topics related to this project include simulation of dynamic systems, artificial intelligence, flight testing of UAS and hardware implementation.
Categories: Faculty-Staff
-
Experimental Testbed for the Validation of Autonomous ISAM/OSAM Systems
PI Morad Nazari
CO-I Kadriye Merve Dogan
CO-I Thomas Lovell
The ability to validate individual hardware and software components of these technologies on a large scale is still in its early stages. Thus, the goal of this research is to establish an effective experimental testbed for the validation of autonomous in-space servicing and maintenance (ISAM) / on-orbit servicing and maintenance (OSAM) systems.
A new era of affordable space flight, satellite refueling, on-orbit inspection, orbit transfer and end-of-life servicing has begun as a result of the space industry's continued focus on safe, resilient and adaptable space vehicles. These developments have laid the groundwork for assembly and manufacturing in orbit or space for potential use in active debris removal, reuse and recycling of materials. Advanced navigation and control technologies are required to ensure and lengthen the mission life cycles of these orbital assets, which include launch vehicles, satellites and space stations. Orbit/attitude determination, relative motion, robot manipulator kinematics and spacecraft rendezvous/docking can benefit from new advances in geometric mechanics Udwadia-Kalaba, adaptive control, learning, sensor fusion, computer vision and data communication. These efforts aim to equip future enterprises with the ability to perform in-space servicing and maintenance (ISAM) and on-orbit servicing and maintenance (OSAM) of failed or damaged space assets, as well as in-space manufacturing and platform assembly. However, the ability to validate individual hardware and software components of these technologies on a large scale is still in its early stages. Thus, the goal of this research is to establish an effective experimental testbed for the validation of autonomous ISAM/OSAM systems.Categories: Faculty-Staff
-
Flexible Body Control Using Fiber Optic Sensors, Florida Space Grant Consortium
PI Morad Nazari
CO-I Daewon Kim
This project would build on previous research that developed the dynamics formulation and control of a rigid-flexible system.
This project would build on previous research that developed the dynamics formulation and control of a rigid-flexible system. A cantilevered beam attached to a rotating central body is considered and analyzed through the finite element method. A set of matrix differential equations are obtained to describe the dynamic behavior of the system, and a control law based on a Lyapunov function is obtained and applied to the system. The development of this dynamics formulation and control also considers the rigid-flexible coupling present in the system. The control law is designed such that the system can achieve and maintain a set of desired states for the central rigid body and flexible structure. The experimental measurements obtained from the implementation of FOS sensors on the flexible body and inertial sensors on the rigid body will be utilized as the input in this control design. The research portion of the project is anticipated to require one or two graduate student research assistants and a part-time academic advisor over a one-year period.
Categories: Faculty-Staff
-
Reconfigurable Guidance and Control Systems for Emerging On-Orbit Servicing, Assembly and Manufacturing (OSAM) Space Vehicles
PI Morad Nazari
CO-I Kadriye Merve Dogan
In this project, the ControlX team with ERAU partnership will develop agile, reconfigurable, and resilient dynamics and G&C algorithms for on-orbit servicing to capture a broad set of OSAM applications such as remediation of resident space object (RSO) (e.g., via de-orbiting, recycle, end-of-life servicing, satellite refueling, etc.) using effective tools and methods involving geometric mechanics, constrained G&C synthesis, and reconfigurable robotic manipulators (RRMs).
Dynamic response to emergent situations is a necessity in the on-orbit servicing, assembly and manufacturing (OSAM) field because traditional on-orbit guidance and control (G&C) cannot respond efficiently and effectively to such dynamic situations (i.e., they are based on either constant mass or diagonal matrix of inertia). In these circumstances, the current challenge is to develop modeling strategies and control systems that exhibit intelligence, robustness and adaptation to the environment changes and disturbances (e.g., uncertainties, constraints and flexible dynamics). Note that the current state-of-the-art methods do not offer a reliable, accurate framework for real-time, optimal accommodation of constraints in the system dynamics that account for orbital-attitude coupling in the motion of the bodies without encountering singularity or non-uniqueness issues. In this project, the ControlX team with ERAU partnership will develop agile, reconfigurable, and resilient dynamics and G&C algorithms for on-orbit servicing to capture a broad set of OSAM applications such as remediation of resident space object (RSO) (e.g., via de-orbiting, recycle, end-of-life servicing, satellite refueling, etc.) using effective tools and methods involving geometric mechanics, constrained G&C synthesis, and reconfigurable robotic manipulators (RRMs).
The proposed work in this Phase I includes reconfigurable systems for on-orbit servicing, assembly and manufacturing with learning control methods that minimize tracking error of the end-effector of the RRM in the presence of uncertainties, optimize configuration and accommodate constraint-changing scenarios. Our developments will avoid singularity; not rely on the concept of costates or Lagrange multipliers that are restrictive; handle system uncertainties while enforcing the constraints; use RRMs in different tasks (recycle, debris removing, maintenance, etc.); not need in sensors or exact model knowledge for robotic arms. Specifically, constrained space vehicle control (predicated on Udwadia and Kalaba (UK) formalism) will offer not only accurate and resilient design but also reconfigurability in that G&C algorithms can easily be modified to suit a wide spectrum of OSAM applications. ControlX team will also consider the feasibility of hardware implementation. The selection of sensors, actuators and onboard computers will be an important trade-off between among size, weight, and power (SWaP) constraints, reliability, and computing performance. A real-time operating system (RTOS) is planned to meet timing and memory management constraints, partitioning hardware resources to control software application interactions. An analysis suite for the autonomous system implementation, based on system modeling and learning techniques, will provide onboard analysis, enabling decision-making as to whether the system can continue to meet mission requirements.
Categories: Faculty-Staff
-
Investigate Detect and Avoid Track Classification and Filtering
PI Richard Prazenica
CO-I Troy Henderson
CO-I Morad Nazari
CO-I Tyler Spence
This research will identify key sources of uncertainty in representative detect and avoid architectures and assess the downstream risks and effects of spurious information on downstream system performance
In this project, which is funded by the FAA ASSURE program, the research team consisting of The Ohio State University, Embry‑Riddle Aeronautical University, Mississippi State University, University of North Dakota and Cal Analytics will work together to:
- Identify the key sources of misleading surveillance information produced by airborne and ground-based detect and avoid (DAA) systems. Develop risk modeling and analysis tools to assess the system-wide effects of false or misleading information on alerting and separation, as well as impacts on pilots in command (PIC) and air traffic operators.
- Provide guidance and recommendations for track classification and filter performance and safety requirements to standards bodies, including Radio Technical Commission for Aeronautics (RTCA) and American Society for Testing and Materials (ASTM) DAA working groups, and inform Federal Aviation Administration (FAA) rulemaking on DAA operations.
Current guidance provided by the Federal Aviation Administration has made beyond visual line of sight (BVLOS) missions an executive priority. Key to the success of these missions is the development of DAA systems capable of providing accurate pilot in the loop, or autonomous deconfliction guidance. Current standards for DAA services provided by RTCA and ASTM do not address the requirements for system performance with respect to generation of false or misleading information to the PIC or autonomous response services of the unmanned aircraft system. This research will identify key sources of uncertainty in representative DAA architectures and assess the downstream risks and effects of spurious information on downstream system performance. Additionally, recommendations will be developed for track classification accuracy requirements that provide sufficient safety margins for enabling DAA services in support of BVLOS missions.
Categories: Faculty-Staff
-
Langrangian Wind Tunnel
ERAU is supporting industry (i.e. Global Aerospace Corp.) in the development of a novel hypersonic wind tunnel by using high-fidelity computational fluid dynamcs.
GAC is leading development of a wind tunnel in which the test article is propelled thru the test section at hypersonic speeds using a novel, proprietary approach. Due to proprietary restrictions a simplistic version of the test article is illustrated below as it moves Mach 10 from right to left. Shock waves may be observed reflecting off tunnel walls. A Phase I Air Force STTR effort has been completed and Phase II is expected to begin in the near future.
Categories: Faculty-Staff
-
GAANN
CO-I William Engblom
CO-I J. Gordon Leishman
This project is sponsored by the Department of Education Graduate Assistance in Areas of National Need (GAANN) fellowship program to support six to 10 Ph.D. students of high ability and financial need in the Department of Aerospace Engineering at Embry-Riddle Aeronautical University.
This project is sponsored by the Department of Education Graduate Assistance in Areas of National Need (GAANN) fellowship program to support six to 10 Ph.D. students of high ability and financial need in the Department of Aerospace Engineering at Embry-Riddle Aeronautical University. The purpose of the program is to enhance and diversify the pool of U.S. citizens who are qualified to teach and pursue research careers in the field of aerospace engineering.
Embry-Riddle's Aerospace Engineering Department is among the top aerospace engineering programs in the nation. It is currently ranked 32nd for its graduate programs and 8th for its undergraduate program by U.S. News and World Report. The department currently has 34 faculty comprised of distinguished researchers and teachers in the fields of aerodynamics and propulsion, dynamics and control, as well as structures and materials.
GAANN Fellows will participate in a formal training/teaching program, which will allow them to learn, observe experienced teachers and gain hands-on experience in teaching. Fellows will receive instruction on effective teaching techniques and will be evaluated formally on their teaching. A far-reaching recruitment plan will allow Embry-Riddle to identify outstanding and eligible students, especially from traditionally underrepresented groups. Embry-Riddle is contributing matching funds in the form of tuition and fee assistance.
If you are interested in being supported as a GAANN Fellow, please contact Dr. Lyrintzis at lyrintzi@erau.edu.Categories: Faculty-Staff
21-30 of 30 results