31-40 of 74 results
-
Integrated Structural Health Sensors for Inflatable Space Habitats
PI Dae Won Kim
PI Sirish Namilae
Under this research project we will develop an innovative structural health monitoring system for inflatable space habitat structures by integrating nanocomposite piezoresistive sensors
Inflatable structures for space habitats are highly prone to damage caused by micrometeoroid and orbital debris impacts. Although the structures are effectively shielded against these impacts through multiple layers of impact resistant materials, there is a necessity for a health monitoring system to monitor the structural integrity and damage state within the structures. Assessment of damage is critical for the safety of personnel in the habitat, as well as predicting the repair needs and the remaining useful life of the habitat. We are developing a unique impact detection and health monitoring system based on hybrid nanocomposite sensors composed of carbon nanotube sheet and coarse graphene platelets. An array of these sensors sandwiched between soft good layers in a space habitat can act as a damage detection layer for inflatable structures. We will further develop algorithms to determine the event of impact, its severity, and location on the sensing layer for active health monitoring. Our sensor system will be tested in the hypervelocity impact testing facility at UDRI in future.Categories: Faculty-Staff
-
FMSG: Cyber: Perceptual and Cognitive Additive Manufacturing (PCAM)
PI Daewon Kim
CO-I Eduardo Rojas
This grant supports fundamental research on a radical transformation of additive manufacturing through digitally connecting machines, humans, and manufactured products.
This grant supports fundamental research on a radical transformation of additive manufacturing through digitally connecting machines, humans, and manufactured products. Additive manufacturing has enabled a new paradigm shift from conventional design for manufacturing approaches into manufacturing for design. A fundamental change in additive manufacturing is necessary as we enter a new era of intelligent future manufacturing beyond additive manufacturing. A promising solution is the convergence of wireless embedded sensors with artificial intelligence (AI) and machine learning (ML) data processes, which can transform the way people interact with manufacturing processes, factory operations, optimizing efficiency, and anomaly system detection that could provide critical information about evaluated components and systems. This project opens a new transitional door to perceptive and cognitive additive manufacturing, enabling true internet of things and digital twin, connecting devices and machines in factories with robots, computers, and humans, and every product we manufacture in factories. The grant will also support educational activities to upskill the manufacturing workforce, K-12, undergraduate and graduate students, and the public, significantly influencing diverse populations of all ages and backgrounds.
Transformation to cyber-physical production manufacturing demands advanced process monitoring through distributed sensing beyond the current state of digitally connected machines and robots collaborating with humans. This project seeks to enable unprecedented wireless fingerprinting and sensing of additively manufactured parts by embedding wireless sensors and performing predictive analysis and health monitoring using AI and ML techniques. This project proposes a holistic approach involving four core research tasks: 1) to study the effects of embedding sensors during additive manufacturing; 2) to design embeddable acoustic sensors and insert them during the manufacturing process to read physical parameters; 3) to prove that embedded passive sensor signals can be sensed wirelessly using millimeter-wave antennas, and 4) to quickly monitor and evaluate the state of manufactured products using ML algorithms. This project has the potential to enable next-generation cyber-physical production systems.
Categories: Faculty-Staff
-
In Service Performance of Pipe to Structure Connections
PI Payal Kotecha
Dr. Kotecha was awarded a research grant for $200,000 from the Florida Department of Transportation to investigate pipe-to-structure connections.
This two-years project will investigate the performance of installed resilient connectors and typical brick and mortar connections. This will include field inspections and documentation within District 7 for resilient connectors. Additional investigations will also be conducted in other locations for structures with brick-and-mortar connections. These results will further evaluate the potential of statewide deployment of resilient connectors.Categories: Faculty-Staff
-
Vertical Lift Research Center of Excellence (VLRCOE)
PI John Leishman
CO-I Ebenezer Gnanamanickam
CO-I Kaijus Henri Palm
CO-I Guillermo Mazzilli
Ship airwakes are the unsteady turbulent flows that are generated by the earths atmospheric boundary layer (the wind colloquially) blowing over a ship. These flow fields are highly turbulent, not easy to predict and couple with a similar wake flow field generated by a rotorcraft operating close the the ship. This coupling as expected is extremely difficult to predict let along faithfully simulate in a flight simulator. This coupling can have catastrophic consequences for the operation or rotorcraft operating in the vicinity of Naval ships.
Ship airwakes are the unsteady turbulent flows that are generated by the earths atmospheric boundary layer (the wind colloquially) blowing over a ship. These flow fields are highly turbulent, not easy to predict and couple with a similar wake flow field generated by a rotorcraft operating close the the ship. This coupling as expected is extremely difficult to predict let along faithfully simulate in a flight simulator. This coupling can have catastrophic consequences for the operation or rotorcraft operating in the vicinity of Naval ships.
While ship airwakes have now been studied for several decades, there remain many unanswered questions and associated challenges in understanding these unsteady, three-dimensional flows, particularly concerning their turbulence characteristics and how flow scales in the airwake can potentially couple with those of a rotorcraft, including Unoccupied Aerial Systems (UAS). Navy personnel and aircraft safety remain the primary motivating factor for understanding the airwake and the interactions so produced. In this regard, developing a versatile, high-fidelity mathematical model to represent the ship airwake in a flight simulation, such as using a reduced-order mathematical representation, remains a priority for the technical community. This goal is particularly critical for more contemporary ship shapes typical of the current Navy inventory. It is toward this end that the fluid dynamic studies of the airwake are addressed in this proposed task. Furthermore, a vast majority of ship airwake measurements have not considered the interactions between an operating rotor(craft) and the airwake, another challenge the proposed task will address.
Overall, the mean flow features of the ship airwake are currently reasonably well characterized, at least for simplified ship superstructures such as the SFS2. However, much of the combined spatio-temporal behavior of the ship airwake, in general, has not been measured and so the physics are still poorly understood, particularly for contemporary Navy ship shapes. Organized turbulence structures, their distribution of energy across different scales, and their interactions with, or influence on, or criticality for, a traditional rotorcraft or less conventional UAS are not understood or sufficiently documented so far. The recent time-resolved airwake measurements of the current PIs have better established the true three-dimensional nature of the ship airwake, along with other turbulent aspects of the flow that have not been previously documented. These features include the high degree of intermittency, the bistable nature of the airwake, etc. These recent measurements have highlighted the predominance of low frequencies in the airwake, but not exclusively so. They indicate the likelihood of coupling with the response of any rotor system, large or small These new measurements have emphasized the need for spatially and temporally resolved high-frequency flow measurements that capture the true three-dimensionality of the airwake flow and its turbulent aspects, including intermittency. In addition, parsing these measurements into low-order mathematical models (such as for use in FlightLab or similar) remains a challenge, both in the context of understanding the flow physics and developing a higher-fidelity representation of the airwake for use in piloted simulations. Furthermore, the challenge of measuring, understanding, and representing the interactions between the airwake and a rotor system still remains to be studied at the fidelity needed if faithful models of the airwake are to be realized.
Technical Objectives (ERAU tasks only):
1) With the focus on faithfully capturing the three-dimensionality of the flow and its turbulent aspects (such as the frequency content and intermittency), time-resolved particle image velocimetry (TR-PIV) measurements with high spatio-temporal resolution will be conducted. These measurements are proposed for a more relevant ship geometry, namely the NATO Generic Destroyer (GD) of NATO AVT-315, while also investigating the differences to the widely used SFS2. Also, a representative rotor system will be introduced into the airwake to study the interactions therein. ERAU will use their new subsonic 4x6 ft wind tunnel with a mostly glass test section and the large field of view TR-PIV system awarded under an ONR DURIP. The focus will be on carrying out dual-plane, time-resolved stereo PIV (DPTR-sPIV) measurements, which allow for spatially and temporally synchronous measurements.
2) These datasets will then be used to represent the flow field using reduced-order models (ROMs). The advantages of methods such as wavelets, spectral POD (sPOD), Multi-scale Proper Orthogonal Decomposition (mPOD), and probabilistic/statistics techniques, will be used to acquire physical insights into the complex airwake environment, while describing the flow in a manner that is more relevant to the scales of UAS. This proposed approach will also offer new quantitative metrics for comparing airwakes, sorted into frequencies, which quantitatively reflect the energy distributions, and so they are much more suitable for V&V. ROMs can then be constructed, and flow field physics and interactions can be examined at each scale, whose contours should be comparable across all frequencies.
Categories: Faculty-Staff
-
REU Site: Exploring Aerospace Research at the Intersection of Mechanics, Materials Science, and Aerospace Physiology
PI Foram Madiyar
CO-I Alberto Mello
This Project is founded by National Science Foundation, under REU site. This project aims to educate students and promote scientific research in materials and aerospace science that encompasses not only building lighter and smarter materials for aerospace applications but also understanding the impact of the space environment on physiological and biological changes.
This Site will focus on multidisciplinary research in aerospace engineering, chemistry, and applied space biology with a goal of improving future space materials science and human diagnostic technology by exposing students to the challenges in these areas and the research going on to solve them. Undergraduate students for a ten-week summer will be recruited for the program. The student recruitment will start in Nov 2021 and the first summer research will be held in the period of May 16 to July 18, 2022.
The ERAU-REU program is dedicated to the ideals of diversity, equity, accessibility, and inclusion and we ensure a safe and comfortable environment for all scholars. Please contact us if you have any questions or concerns about the housing accommodations or other aspects of the program.
Students from underrepresented groups in the sciences, veterans, disabled, or are early in their undergraduate coursework (rising sophomores or juniors) are especially encouraged to apply.
Research Areas:
1 - Additive Manufacturing of Shape-Stabilized Phase-Change Materials (PCMs)
Mentor: Prof. Sandra Boetcher (https://faculty.erau.edu/Sandra.Boetcher)
The goal of the proposed research is to manufacture shape-stabilized PCMs via additive manufacturing.
2 - Space Radiation: Study of Intracellular Reactive Oxygen Species
Mentor: Prof. Hugo Castillo (https://faculty.erau.edu/Hugo.Castillo)
The goal of this project is to produce a standardized technique to measure the intracellular concentration of ROS in different species of bacteria and yeast, in relation to chronic exposure to sub-lethal doses of ionizing radiation using a low-dose gamma irradiator allowing to quantify the oxidative stress status of the cell concerning DNA damage.
3 - Investigating Micro- and Nano-Plastics in the Confined Environment of Space Flight.
Mentor: Prof. Marwa El-Sayed (https://faculty.erau.edu/Marwa.ElSayed)
The proposed study aims to characterize atmospheric MNP in indoor environments. The goals of the study are 1) identification of the sizes, shapes and size distribution of MNP in the atmosphere, 2) characterization of the chemical composition of atmospheric MNP, 3) determination of the degradation processes and 4) identification of the health issues associated with these particles.
4 - Investigation of Space Biomechanics and Additive Manufacturing of the Orthopedics
Mentor: Prof. Victor Huayamave (https://faculty.erau.edu/Victor.Huayamave)
The participants will learn about (1) current state of space biomechanics research, (2) segmenting anatomical images to develop finite element models, and (3) 3D printed components using additive manufacturing. The computational pipeline will be introduced to the predictive power of the FEM to assess the structural integrity of the hip joint under microgravity conditions.
5 - Fabrication of a Flexible, Stretchable, and Self-Healable Platform for Aerospace Applications
Mentors: Prof. Foram Madiyar, Prof. Daewon Kim (https://faculty.erau.edu/Foram.Madiyar, https://faculty.erau.edu/DaeWon.Kim)
The goal of this project is to investigate the use of polymers not only having tunable electrical and thermal properties, but also reversible bond chemistry that imparts materials high stretchability, exceptional toughness, and self-healability.
6 - On-Site Biomarker Sensing using Flexible Transistors on Skin
Mentor: Prof. Foram Madiyar (https://faculty.erau.edu/Foram.Madiyar)
The goal of the project is to design a wearable technology for the real-time screening, diagnosis and multiplex detection of different biomarkers.
7 - Biofidelic Piezoresistive Nanocomposite Multiscale Analysis
Mentor: Prof. Sirish Namilae (https://faculty.erau.edu/Sirish.Namilae)
In the proposed research, we will further engineer the electro-mechanical response of the structure through (a) varying the constituents in the silicone matrix and (b) engineering the interface mechanical properties in the core layer.
8 – Fractography using Scanning Electron Microscopy
Prof. Alberto Mello (https://faculty.erau.edu/Alberto.Mello)
This research aims to cover scanning electron microscope (SEM) operation, including energy dispersive spectroscopy (EDS) and stress analysis. The student will cut and prepare fractured specimens, observe the crack surface under SEM to identify the local pit formation at the plate edge, find the point of crack initiation, and determine the propagation path.
9 - Investigation of Photoresponsive and Thermally Stable Monomeric Structures for Space Applications
Mentor Prof. Javier Santos (https://faculty.erau.edu/Javier.SantosPerez)
The goal of the project is to investigate the photoresponsive and thermally stable monomeric structures to sense damage, fractures, and changes to space infrastructures.
10 - Investigating Methods to Minimize the Gap between Pre and Post-Space Flight Syndrome
Mentor: Prof. Christine Walck (https://faculty.erau.edu/Christine.Walck)
We propose to design an optimized lower extremity force acquisition system (LEFAS) that integrates with a lower-body negative pressure (LBNP) box and subject-specific protocols for improved fitness results by taking a computationally simulated optimization approach.
Categories: Faculty-Staff
-
JET-AIRFRAME INTERACTIONS FOR NOISE SUPPRESSION
PI Reda Mankbadi
JET-AIRFRAME INTERACTIONS FOR NOISE SUPPRESSION
The Embry-Riddle team developed a passive noise suppression technology utilizing the interactions of the airframe with the jet plume. In this technology, the flat surface of the airframe adjacent to the jet plume is modified to create a slightly wavy surface instead. Such design modification can be applied to the existing design concepts with engine mounted under the wing, as well as, the top-mounted engine configurations.
The near-field perturbations are reflected by the wavy surface to create an excitation wave to amplify the jet and the shear layer instability. The wavy-surface parameters are designed such that the excitation frequency is the harmonic of the fundamental frequency responsible for the peak noise. Through nonlinear fundamental-subharmonic interaction, the sound source and its radiated far-field noise are reduced.
To verify this concept, high-fidelity simulations of a supersonic rectangular jet in the vicinity of the airframe surface were carried out. Results show that when the flat airframe surface is reduced by a wavy one, the radiated sound was reduced by 3.7dB for top-mounted engine, and by 2.6dB for under-airframe engine.


Implemntation of wavy surface design to suppress jet-surface interaction noise.
(Left) Top-mounted engine configuration, (Right) Conventional enginr-under airframe design


Acoustic spectra at the far-field observer 42 diameters away from the nozzle exit
(Left) Engine mounted on top of airframe, (Right) Engine mounted under the wing
Categories: Faculty-Staff
-
Fundamental Experimental and Numerical Combustion Study of H2 Containing Fuels for Gas Turbines
PI Scott Martin
This project is a University Turbine Systems research grant funded by the Department of Energy. In collaboration with the University of Central Florida, Purdue University and the University of New Mexico, Embry‑Riddle will develop fundamental data and modeling of H2 and NH3 fuels for gas turbine power plants.
Categories: Faculty-Staff
-
Human Factors Awareness Training for FAA Aviation Safety Specialists Within Aircraft Certification and FAA Flight Standards
PI Scott Martin
In this project, which is funded by the FAA, Embry‑Riddle and Kent University will develop training for individuals within the FAA’s Aviation Safety Flight Standards Service who have expertise and job responsibilities related to the evaluation of aircraft systems design, maintenance, operations, procedures and pilot performance.
Categories: Faculty-Staff
-
Behavior of superalloys subjected to fatigue loads under high temperature
PI Alberto Mello
CO-I Paulina De La Torre Morales
CO-I Open Position - New students are welcome
This study is evaluating what initial conditions can activate cubic slip planes, then the level of accommodation and strain homogenization within the grain, and how a given initial condition affects the material behavior when subjected to operational cyclic loads under high temperature.
Ni-based super alloys are widely used in turbine engines mainly due to its high strength and fatigue resistance at elevated temperatures. One hypothesis to explain its atypical characteristic among metals is that a cross-slip mechanism is in place. The activation of {100} cubic slip systems along of the octahedral slip planes {111} in Ni-based superalloys has been verified when under high strain and temperature. The material would exhibit a more homogeneous strain distribution and less strain localization. We seek for the ideal precondition that will improve the endurance of Ni-based superalloy (IN 718) samples subjected to operational loading. We evaluate the initial conditions that activate cubic slip planes, the level of accommodation, and strain homogenization within the grain. With focus on the deformation mechanism, the sample microstructure can be fully characterized by electron backscatter diffraction (EBSD) and the slip systems, after the applied pre-condition, can be tracked via digital image correlation (DIC).
Accomplished tasks:
(a) samples’ manufacturing, (b) sample polishing and preparation, (c) furnace installation and operational tests, (d) development of laboratory procedures, equipment and microscopes (optical and SEM), (d) calibration and controller fine tuning for the MTS tensile testing machine, and (e) fatigue test with several specimens, including control samples and modified pre-conditions
Next steps:
Characterization of the microstructure of tested specimens under special conditions via EBSD to identify the slip planes and confirm or not the activation of cubic slip systems.
Categories: Faculty-Staff
-
Pilot-in-the-Loop UAS Mobile Research Test-Bed
PI Hever Moncayo
CO-I May Chan
CO-I Ashwini Agrawal
CO-I Agustin Giovagnoli
This project aims to develop and implement a Mobile UAV Ground Control Station (GCS) supporting aviation safety research with pilot-in-the-loop capabilities using unmanned aerial systems platforms, in which flight conditions, such as systems failures, could be simulated in real-time to characterize pilot response, control laws performance, and human-machine and control laws interactions.
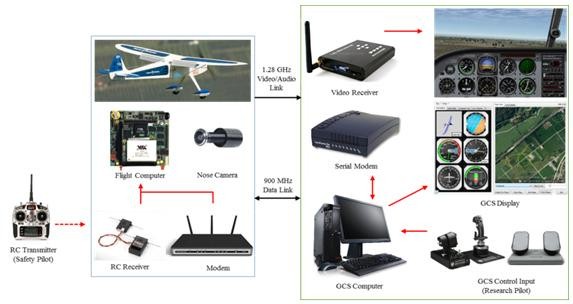 A fruitful achievement of this project will provide a platform to validate and assess new concepts and technologies that are beneficial for improving engineering fidelity of early systems integration testing based on pilots feedback and their interaction with on-board flight controls systems.
A fruitful achievement of this project will provide a platform to validate and assess new concepts and technologies that are beneficial for improving engineering fidelity of early systems integration testing based on pilots feedback and their interaction with on-board flight controls systems.Categories: Faculty-Staff
31-40 of 74 results