Free-Flying Unmanned Robotic Spacecraft for Asteroid Resource Prospecting and Characterization
In this project, Embry-Riddle Aeronautical University (ERAU) and Honeybee Robotics (HBR) are developing an integrated autonomous free-flyer robotic spacecraft system to support the exploration and subsequent resource utilization of asteroids as well as other planetary bodies and moons. The proposed spacecraft will address the first step towards In Situ Resource Utilization from Near Earth Object bodies; namely, it will prospect it with sample acquisition devices and characterize the NEO for ISRU potential. Embry-Riddle and Honeybee Robotics are focused on an innovative resource prospecting mission concept based on autonomous small marsupial free-flyer prospector spacecraft. Such technologies are currently being developed at ERAU. The spacecraft will utilize unique technologies such as MicroDrills and Pneumatic Samplers previously developed under other SBIR projects by Honeybee Robotics. In particular, the proposal will focus on flight control and reconfiguration for guidance under extreme environments, vision-aided navigation approaches, and sampling systems design, testing and evaluation. The successful completion of the proposed research is anticipated to provide a theoretical and experimental framework to investigate the capabilities of a marsupial-based robotic system to explore and extract samples from terrains that would be inaccessible to traditional rover-type vehicles and where traditional flight guidance and navigation sensors, such as GPS receivers and magnetometers, are not functional.
Sponsors:
- National Aeronautics and Space Administration (NASA)
- SBIR/STTR Technologies





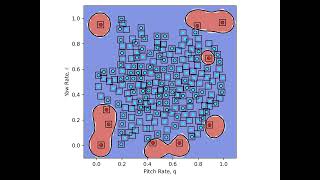
As space system technologies continue to progress, space systems will require more robust, online health monitoring systems that are capable of identifying and compensating for faults or threats to the system. Due to unforeseen circumstances and naturally occurring threats, an on-board fault diagnosis system for space vehicles capable of autonomous Threat Detection, Isolation, and Recovery (TDIR) is necessary to maintain space operations and mitigate operational gaps as mission complexities increase. Data-driven methods are being explored for FDIR in aerospace systems. The ADCL lab has developed a health monitoring system tool that employs machine learning algorithms such as Support Vector Machine, incremental learning and the principle of self-nonself-discrimination to distinguish between nominal and failure data. This methodology addresses the complexity and multi-dimensionality of aerospace system dynamic response in the context of abnormal conditions and is aimed to assist spacecraft with recovery maneuvers in real-time.
Fault Detection using Incremental Learning algorithms.

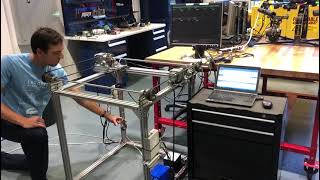
Integrated Gravity Off-Loading Robotic System
The IGOR facility is an alternative solution for testing guidance and control algorithms of Aerospace Unmanned Systems where it is possible to have six degrees of freedom plus translation in all three axes. The system has the capability of carrying spacecraft using a cable and following its motion by using a X-Y tracking active system. It also has a gravity offload device that simulates reduced gravity, which allows different space environments to be simulated.
Sponsor:
- National Aeronautics and Space Administration (NASA)


Motion-Based Flight Simulator Research
This motion-based six-degree-of-freedom flight simulator supports the design, development and testing of advanced intelligent algorithms to enhance aviation operational safety and technology. This device allows the validation and verification of advanced flight control systems and algorithms to preserve an acceptable level of safety during real flight operations. Another important area that this simulation tool supports is the analysis and evaluation of the pilot’s behavior and his/her interaction with onboard flight control mechanisms. This leads towards research and development to detecting pilot abnormal conditions or inadequate response, assessing adverse interactions with intelligent control laws, and developing mechanisms that can mitigate their effects through design and ad-hoc countermeasures.
Sponsor:
- Florida Department of Education UAS Facility


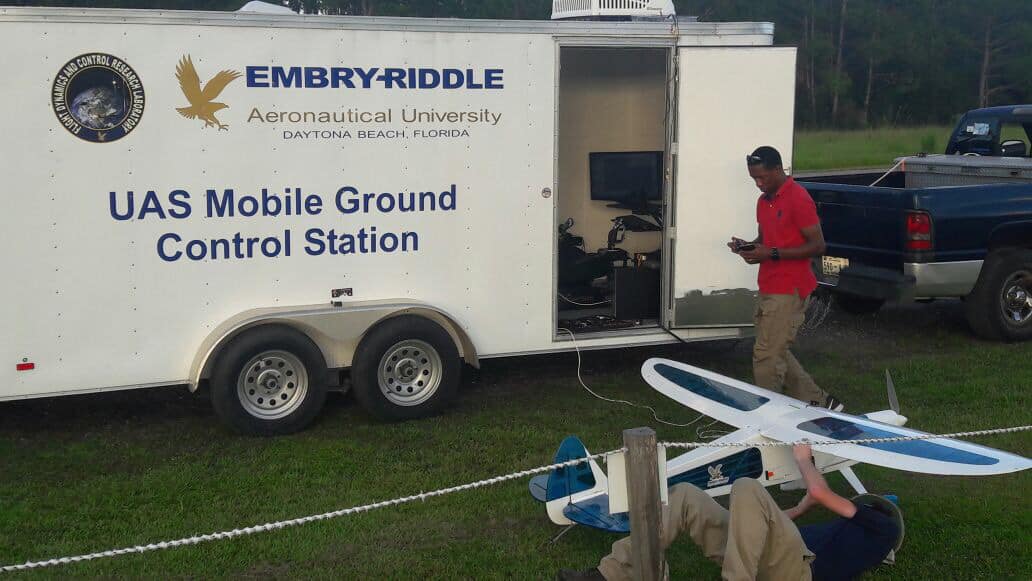
Pilot-in-the-Loop Mobile Research Test Bed
This project aims at developing and implementing a Mobile UAV Ground Control Station (GCS). The system will support aviation safety research with pilot-in-the-loop capabilities using unmanned aerial systems platforms and where flight conditions, such as subsystems failures, could be simulated in real-time to characterize pilot response, control laws performance, and human-machine and control laws interactions. A fruitful achievement of this project will provide a platform to validate and assess new concepts and technologies that are beneficial for improving engineering fidelity of early systems integration testing based on pilots feedback and their interaction with on-board flight controls systems.
Sponsor:
- Embry-Riddle College of Engineering


Resilient Multiagent Robotic Systems
Several mission applications that involve the deployment of groups of autonomous vehicles demand decentralized swarming capabilities and require advanced and novel technologies to increase overall mission performance, particularly if they are operating under complex and dynamically changing environments. These advanced autonomous systems based on single-agent or multi-agent cooperative networks require adequate intelligent systems to increase mission safety and optimize performance within complex, unstructured and dynamic operating environments. The purpose of this project is to develop intelligent algorithms to improve resilience of multi-agent systems (MAS). A general architecture inspired by the functioning of biological mechanisms is designed to increase autonomy in a swarm of unmanned aerial vehicles (UAVs) through self-learning, self-organizing and optimal flight trajectories. We demonstrate and evaluate on-board intelligent techniques at different levels by combining self-detection, self-diagnosis, self-recovery and self-organization as a means to increase the safety of swarm missions, optimize endurance and maintain performance within hazardous operating environments with minimal human intervention.
Sponsor:
- Internal Grant


Intelligent Algorithms for Mission Protection of UAVs
The general objective of this research effort is the design, development and proof-of-concept demonstration through simulation and flight tests of intelligent algorithms for mission protection of aerial systems. The goal is to develop a UAV research platform with fully autonomous capabilities that would support broad areas of guidance, navigation and control technologies. This includes sensor fusion, vision-aid navigation, modeling and simulation of aerospace systems.
Intelligent Systems have been developed, implemented and tested in flight test using a 3DR quadcopter testbed. Through an autonomous decision-making process, the vehicle is capable of re-planning its trajectory in real time. Few capabilities the vehicle has are unknown obstacle avoidance, re-planning capabilities due to low battery in the system, re-planning capabilities if the system has an internal failure and more.
Further testing and design is in progress for a more robust autonomous intelligent system.
Sponsor:
- ERAU Student Internal Grant



This research focuses on autonomous spacecraft to not only identify and travel toward moving targets but also repair them, inspect them or assemble new objects entirely from scratch, using a vision-based navigation system that employs wireless communication for tracking and formation flight. The proposed algorithm also uses neural network-based machine learning to identify, track and estimate the positions and intent of other nearby flying agents. This research project was featured in the ERAU news. Here the link.
Sponsor:
- Award from the U.S. Air Force


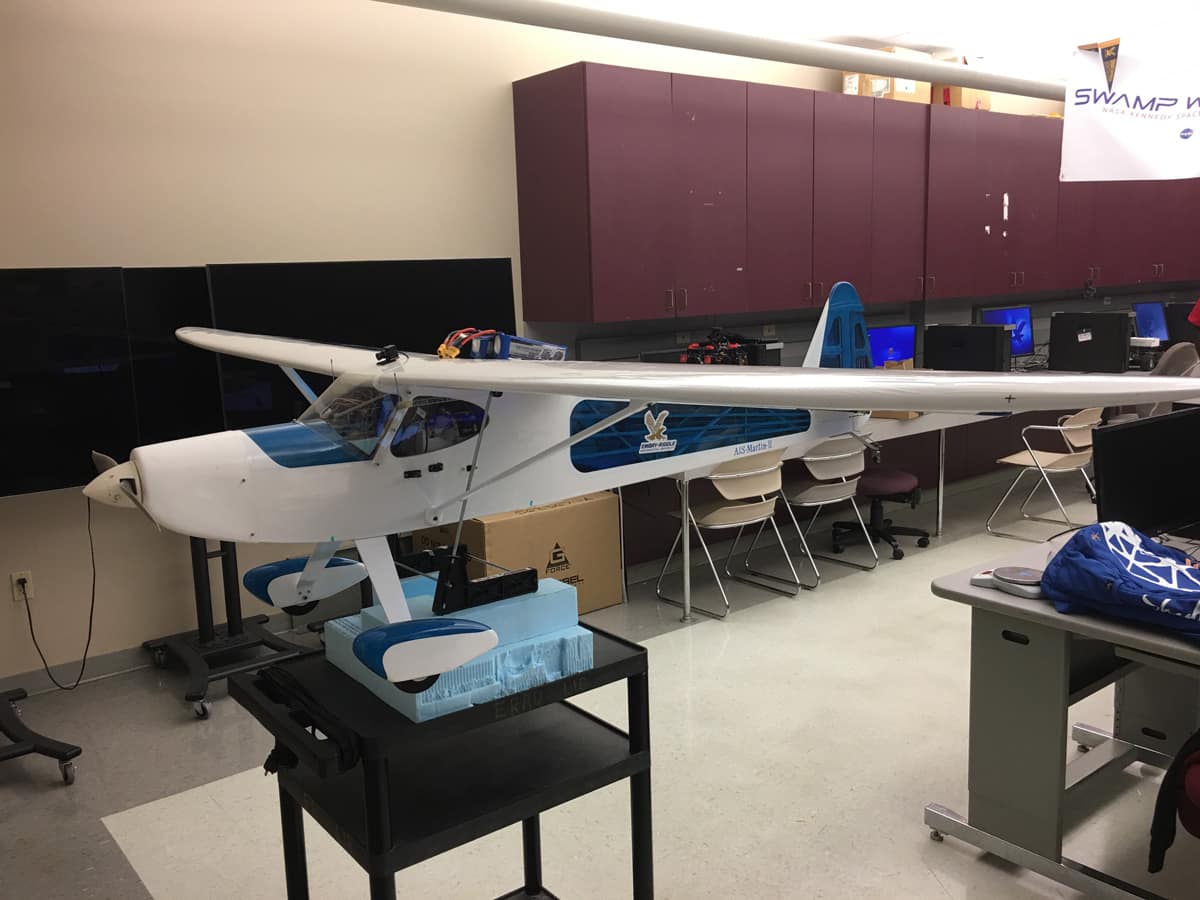
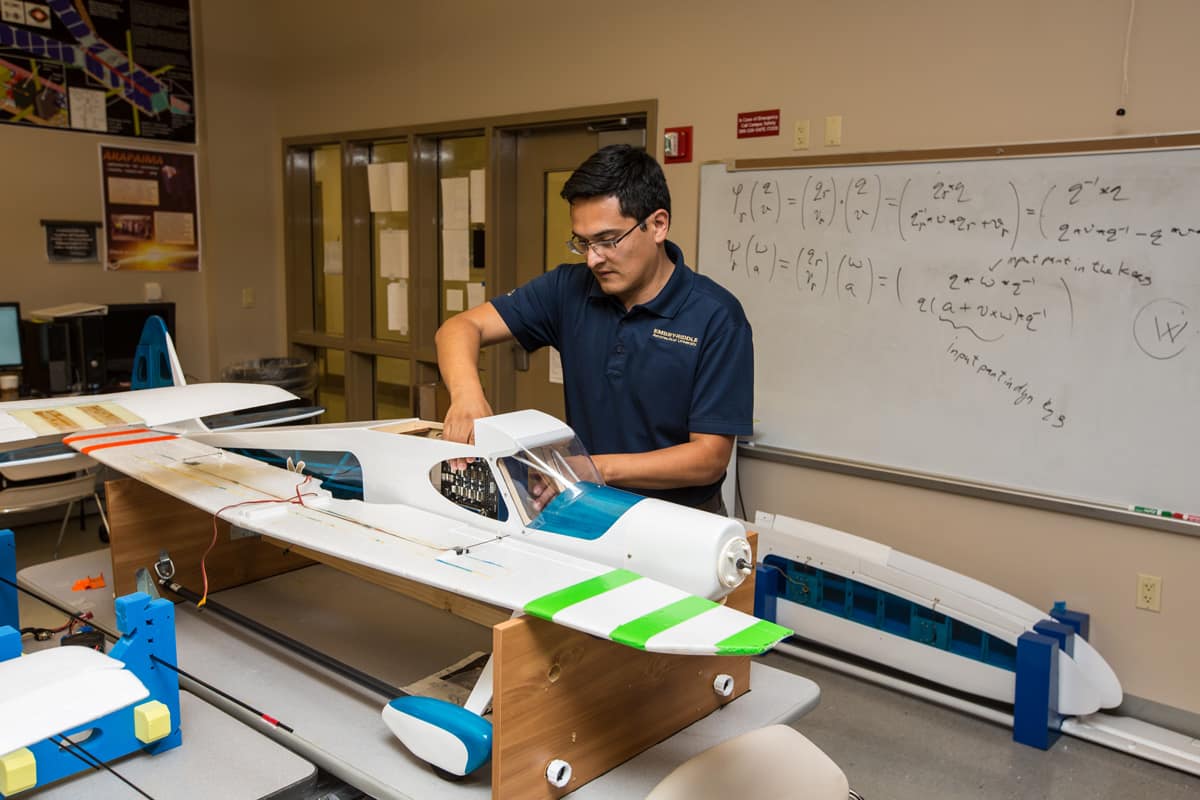
Flight Demonstration of Novel Atmospheric Satellite Concept
The Dual-Aircraft Platform (DAP) is a Phase II NASA Innovative and Advanced Concepts (NIAC) research effort investigating a novel concept for achieving a low-cost atmospheric satellite in the lower stratosphere, which utilizes a combination of wind and solar energy capture. DAP consists of two glider-like unmanned aircraft connected via a thin, ultra-strong cable. Long duration flight simulations have shown the platform could literally sail without propulsion, using levels of wind shear persistently found near 60,000 feet, and substantially increase the energy available for useful payload operations. The central objective of the Phase II effort is to perform autonomous proof-of-concept flight demonstrations of the DAP concept using a small-scale prototype at low altitude. Related objectives are developing specific flight maneuvers and mechanisms required for station keeping and validating the autonomous guidance and control software.
Sponsors:
- National Aeronautics and Space Administration (NASA)
- SBIR/STTR Technologies


Cybersecurity Research of Unmanned Aerial Vehicles
This project, funded by the National Science Foundation (NSF), establishes a new Research Experiences for Undergraduates (REU) Site at Embry-Riddle Aeronautical University. This project focuses on cybersecurity research for unmanned aerial vehicles (UAVs). Each summer, undergraduate students participate in research to understand cybersecurity challenges for UAVs and how to design algorithms and techniques to protect UAVs from cyber-attacks. Research activities in this project explore the cybersecurity of UAVs from multiple angles, including secure communication, data privacy protection, secure control systems for autonomous UAVs, etc.
This past summer, three students (two from ERAU and one from UNLV) initiated this project at ADCL. They were able to perform successful flight tests with a quadcopter that they had set up and commenced the design of a control system for cyber-attack detection in UAVs.
Sponsor:
- National Science Foundation



Lab Information
Location: MicaPlex 108 and 107, and LB231
Lab Directors: Hever Moncayo
Contact Us: Hever.Moncayo@erau.edu