The Space Robotics and Generative Estimation (SRGE) Lab, directed by Dr. Cagri Kilic, specializes in state estimation and navigation for planetary exploration robots. The lab develops physics-informed estimation methods, integrating pseudo-measurements and multi-sensor fusion to enhance localization and mapping in GNSS-denied environments. Research spans single- and multi-robot systems, optimizing autonomy, perception, and mobility in challenging terrains. The lab's work is directly applicable to planetary missions, supporting autonomous exploration, resource prospecting, and robotic collaboration on the Moon and Mars.
Research Focus
- Localization and Mapping: Developing robust state estimation frameworks for ground and legged robots operating on extreme environments (i.e., planetary surfaces).
- Multi-Robot Systems: Exploring swarm-based and distributed estimation techniques for improved localization and environmental perception.
- Physics-Informed Estimation: Enhancing navigation accuracy by incorporating physical laws and constraints relevant to planetary environments.
- Terrain-Aware Mobility: Modeling robot-terrain interactions to improve slip-aware localization and locomotion strategies.
- Application to Space Missions: Translating estimation and navigation methods into practical solutions for planetary exploration missions, including autonomous surface operations, resource prospecting, and robotic collaboration on extraterrestrial environments.
Equipment
- Rover and quadruped robotic platforms
- End effector and manipulators
- High-precision IMUs, LiDAR, and stereo cameras
- Computational resources for sensor fusion and generative estimation modeling
Lab Information
Location: LB 184
Lab Director: Dr. Cagri Kilic, Assistant Professor, Embry-Riddle Aeronautical University
Contact: dbsrgelb@erau.edu or kilicc@erau.edu
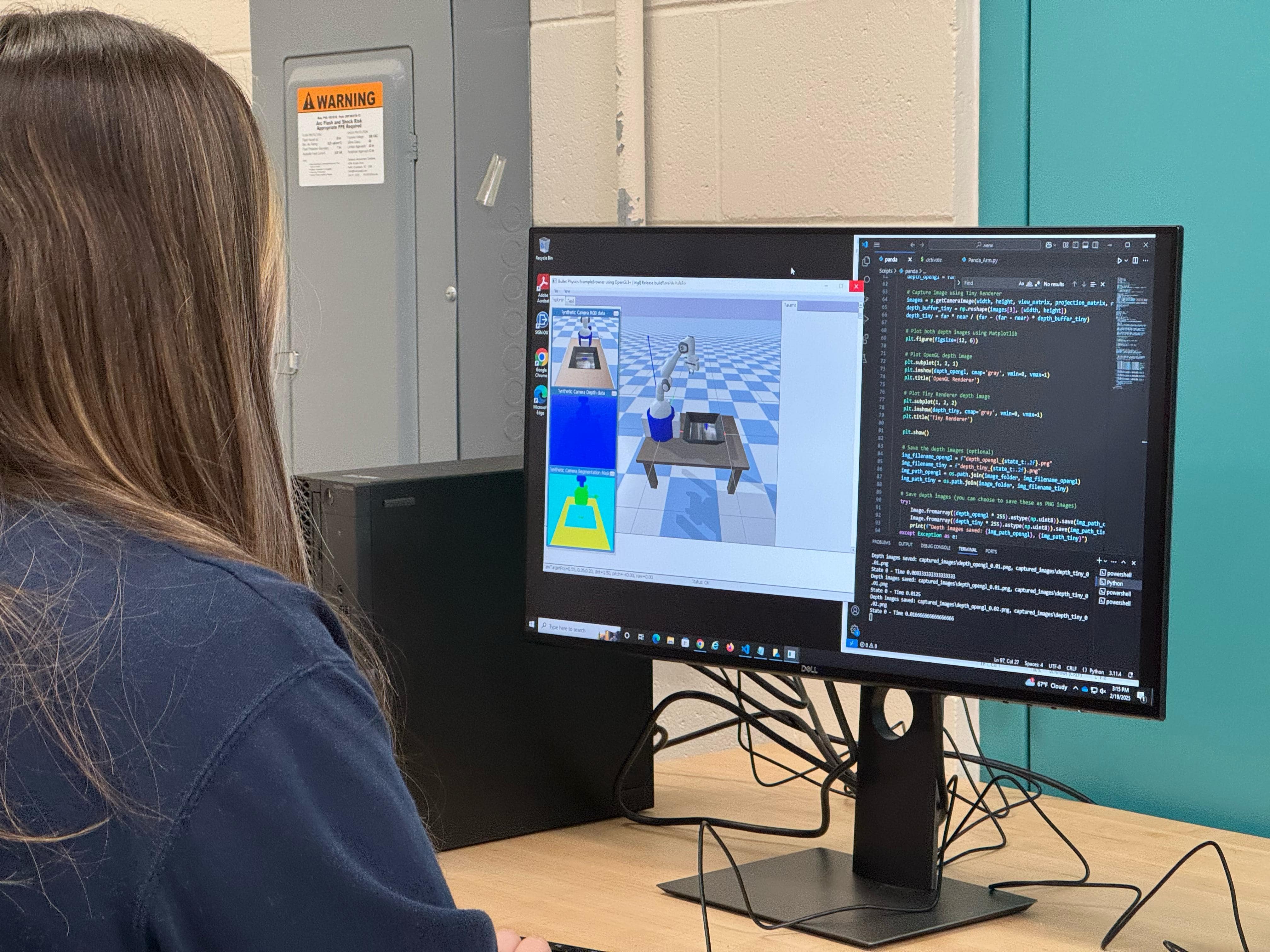
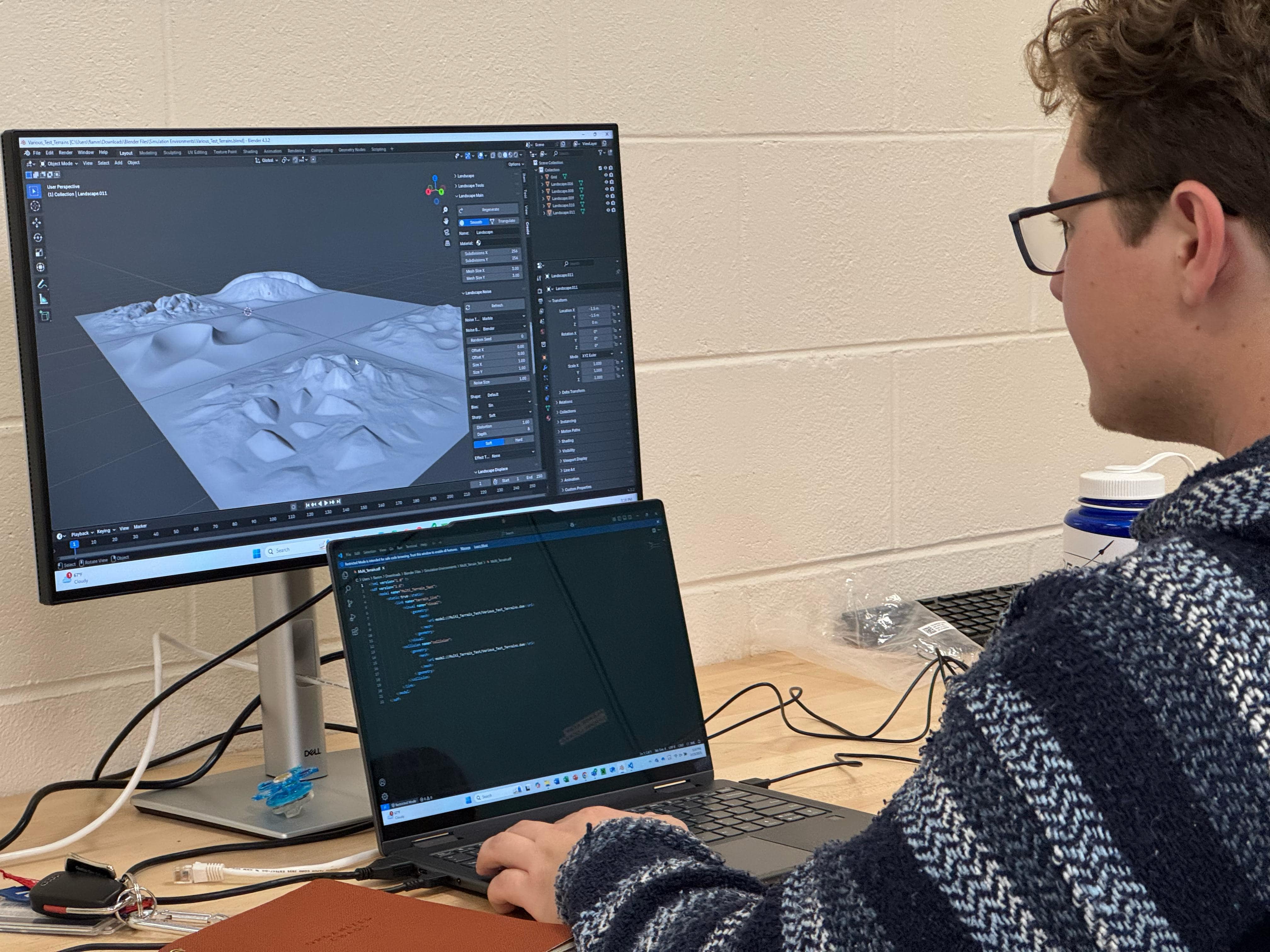
Photos