The Embry-Riddle Biomechanics and Aerospace Laboratory (ERBaL) is used for integrating biomedical systems with aerospace engineering. Aerospace biomedical engineering provides foundational understanding, predictive modeling builds on this knowledge, biomechanics and robotics apply these insights, and education enhancement ensures future expertise. Together, these efforts position Embry-Riddle at the forefront of aerospace biomedical research and education. Students can also get involved by taking ME 344 or ME 544 with Dr. Walck or joining one of the many ongoing projects.
Aerospace-Biomedical Engineering
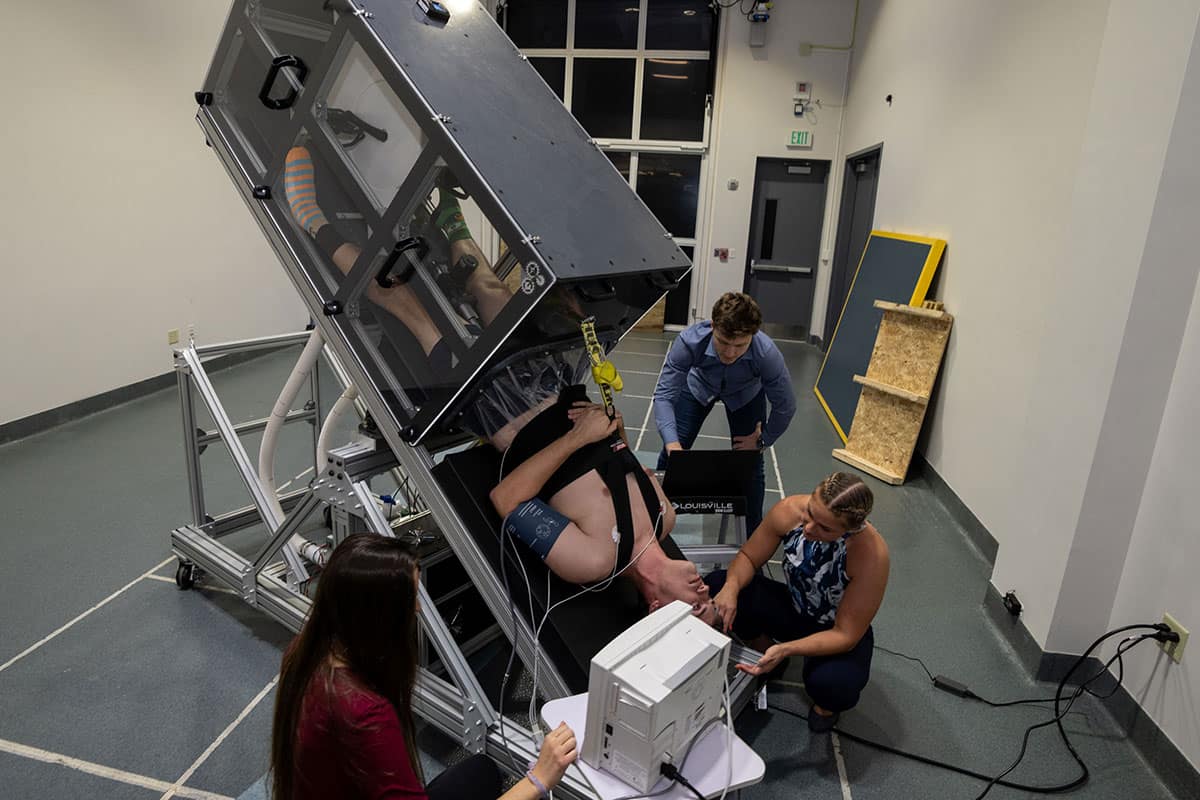
The hostile environment of space has adverse short- and long-term effects on the human body, specifically causing muscle atrophy, bone decalcification and poor cardiovascular endurance. This research aims to effectively reduce the gap between precondition and postcondition syndrome.
Predicative Modeling
Utilizing machine learning and artificial intelligence, this area predicts physiological changes caused by environmental conditions. A notable project integrates machine learning with proteomic analysis to enhance the prediction of musculoskeletal changes, building on findings from aerospace biomedical engineering.
Biomechanics and Robotics
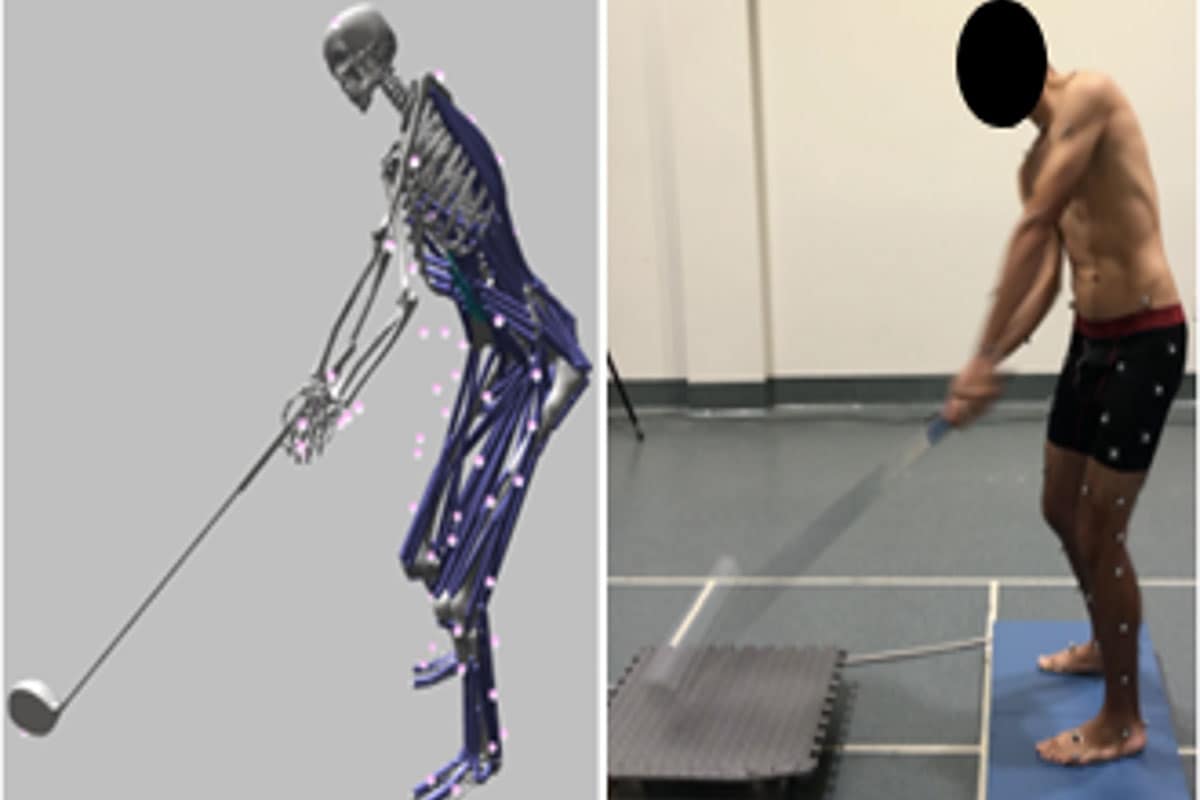
This research develops autonomous systems, space-deconditioning countermeasures and assistive technologies. It includes efforts in robotic logistics automation and rehabilitation systems extending the knowledge gained from aerospace biomedical research and predictive modeling while using biomechanics, computer science, imaging and neuroscience to analyze muscle function, study human movement, enhance medical rehabilitation protocols and optimize human performance.
Space Physiology
The hostile environment of space has adverse short- and long-term effects on the human body, specifically causing muscle atrophy, bone decalcification, and poor cardiovascular endurance. This research aims to effectively reduce the gap between pre- and post-conditioning syndrome.
Projects:
- Mitigate Microgravity Deconditioning Syndrome Using Resistive Exercise as a Countermeasure
- A Novel Resistance Exercise Machine for Use in a Lower Body Negative Pressure Box to Counteract the Effects of Weightlessness
- The Effects of Bone Decalcification Due to Micro-Gravity
Educational Enhancement
This focuses on improving knowledge retention and course alignment using advanced tools. This work aims to address gaps in engineering education and enhance student engagement, preparing the next generation of researchers and engineers in aerospace biomedical systems.
Hardware
- Tono-Pen AVIA® Tonometer
- Technavance 60-degree tilt bed with lower-body, negative pressure chamber-premium. Automated pressure control system and computer, and instrument control software
- Angio CPET Ergometric Unit
- Four lead electrocardiogram and heart rate monitor
- VICON Motion Capture System: Eight Vero v2.2 cameras; Two VICON Vu video cameras (2.1 MP; 60FPS) mounted on tripods; and 12 Vantage V5 (eight wide lenses and four standard lenses) mounted along the ceiling’s parameter
- Camera's frame rates synced to the lesser of the two cameras (i.e., 330 Hz); 4 mm passive reflective markers
- AMTI's OR6-6-OP-2K-CTY 2000 series force; Six plates integrated into the floor
- Delsys Inc Wireless System including Delsys Trigno Minis with trigger module (Delsys, Natick, MA) used to synchronize the EMG data with motion data; sampling rate of 1926 samples per second
- Dell Computers with high-end graphics cards, 128 GB of memory and top-of-the-line processors, each equipped with Vicon Nexus Motion Capture System software, OpenSim musculoskeletal modeling and EMGworks
Software
- Vicon Nexus Motion Capture System
- OpenSim 4.0 musculoskeletal modeling
- EMGworks
- Notepad++
Lab Information
Location: The John Mica Engineering and Aerospace Innovation Complex, Room 107
Lab Director: Christine Walck, Ph.D.
Photos